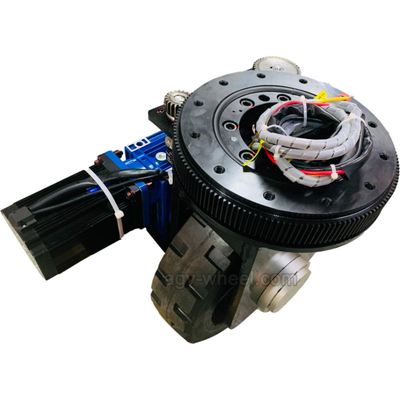
रबर ट्रेड 2 टी लोड हाई ट्रैक्शन एसी मोटर ड्राइव व्हील 15 किमी / एच हेवी ड्यूटी रोबोट व्हील
-
हाई लाइट
2T एसी मोटर ड्राइव व्हील
,15 किमी / घंटा एसी मोटर ड्राइव व्हील
,15 किमी / घंटा हैवी ड्यूटी रोबोट व्हील
-
पहिया चलनासॉलिड रबर
-
पहिये का व्यास400 मिमी
-
भार2टी
-
स्पीड15 किमी/घंटा
-
कर्षण शक्ति2000W
-
संचालन शक्ति750W
-
रेटेड आउटपुट टॉर्क143Nm
-
दृश्य का प्रयोग करेंघर के बाहर
-
उत्पत्ति के प्लेसगुआंगज़ौ, चीन
-
ब्रांड नामZHLUN
-
मॉडल संख्याZL-490
-
न्यूनतम आदेश मात्राबातचीत योग्य
-
मूल्यNegotiable
-
पैकेजिंग विवरणपैकिंग: लकड़ी का बक्सा
-
प्रसव के समय25 दिन
-
भुगतान शर्तेंएल/सी, टी/टी
-
आपूर्ति की क्षमताप्रति माह 1000 टुकड़े
रबर ट्रेड 2 टी लोड हाई ट्रैक्शन एसी मोटर ड्राइव व्हील 15 किमी / एच हेवी ड्यूटी रोबोट व्हील


रबर ट्रेड हेवी ड्यूटी रोबोट व्हील्स 2T लोड हाई ट्रैक्शन पावर
विनिर्देश
|
नहीं
|
मद
|
इकाई
|
आंकड़े
|
|
1
|
स्थापना ऊंचाई
|
मिमी
|
490
|
|
2
|
भार
|
किलोग्राम
|
2000
|
|
3
|
मोटर प्रकार
|
/
|
बीएलडीसी/सर्वो
|
|
4
|
ट्रैक्शन मोटर
|
किलोवाट
|
2
|
|
5
|
गति अनुपात
|
/
|
1:15
|
|
6
|
स्टीयरिंग मोटर
|
किलोवाट
|
0.75
|
|
7
|
स्पीड
|
किमी/घंटा
|
15
|
|
8
|
पहिये का व्यास
|
मिमी
|
400
|
|
9
|
पहिए की चौड़ाई
|
मिमी
|
100
|
|
10
|
सेंसर
|
/
|
ऐच्छिक
|
|
1 1
|
अधिकतम टोर्क
|
एनएम
|
143
|
|
कुछ मापदंडों को समायोजित किया जा सकता है
|
|||
विशेषताएं
पहियों की कंपन-विरोधी संरचना और पतला रोलिंग बियरिंग्स वाले पहियों के उच्च-टोक़ स्टीयरिंग तंत्र को कार्यात्मक आवश्यकताओं को पूरा करने के लिए कड़ाई से डिज़ाइन किया गया है।
विशिष्ट पहिया लेआउट और वाहन की गतिशीलता के आधार पर, घूर्णी गतिज मॉडल के साथ-साथ AGV के सीधे और घूर्णी गतिशील मॉडल स्थापित किए जाते हैं।
तीन गति राज्यों में भारी भार के तहत पहियों की गति विशेषताओं को अच्छी तरह से सत्यापित करने के लिए, जिसमें एक निश्चित बिंदु के चारों ओर सीधी गति, स्व-रोटेशन और रोटेशन शामिल है, एडम्स और कारखाने के प्रयोगों में सिमुलेशन सभी आयोजित किए गए हैं।
सिमुलेशन परिणाम इंगित करते हैं कि पहियों के सामान्य और घर्षण बल कुछ छोटे दोलनों को छोड़कर बहुत स्थिर होते हैं, जो एजीवी पर गैर-केंद्र भार वितरण के कारण होते हैं।
एजीवी की ड्राइविंग गति पर प्रायोगिक परिणामों ने प्रत्यक्ष रूप से प्रदर्शित किया है कि इसकी स्थिति सटीकता वास्तविक विमान असेंबली लाइनों में उपयोग के लिए पर्याप्त है।
एक सर्वदिशात्मक भारी शुल्क वाले एजीवी के लिए पहियों की एक नई आउटडोर लेआउट योजना प्रस्तावित है, जो एजीवी की परिचालन और चलती क्षमता को बढ़ाती है।एजीवी द्वारा एयरोस्पेस और अन्य भारी उद्योगों में बुद्धिमानी और आर्थिक रूप से बड़े वर्कपीस के परिवहन के लिए मानव-मशीन सहयोग का एक कार्य भी पेश किया जाता है।
![]()
![]()
![]()
हमारे उत्पाद पूरी दुनिया में बेचे जाते हैं। आप हमारे उत्पादों की पूरी प्रक्रिया के बारे में निश्चिंत हो सकते हैं।